 |
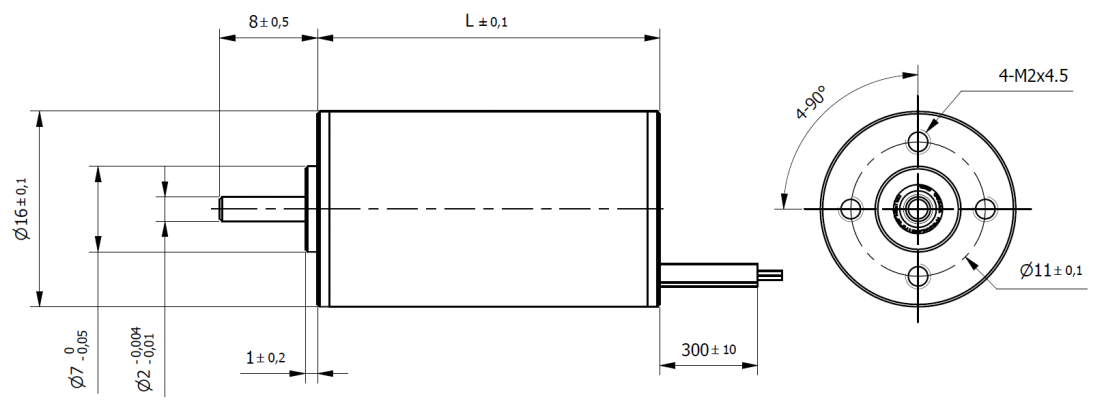
16SBL28Series SBL | Size 16 mm | Length (L) 28 mm | Rated Voltage 12 Vdc | Rated Torque 0.002 Nm | Rated Speed 22000 rpmCodice Prodotto: 16SBL28.000
|
|
|



|
|
16SBL28Series SBL | Size 16 mm | Length (L) 28 mm | Rated Voltage 12 Vdc | Rated Torque 0.002 Nm | Rated Speed 22000 rpmCodice Prodotto: 16SBL28.000
|
|
|
|